Anomaly Detection for Fabricated Artifact by Using Unstructured 3D Point Cloud Data
Abstract
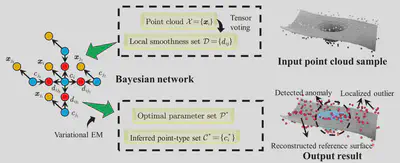
3D point cloud data has been widely used for surface quality inspection of fabricated artifacts, offering high-density, precise measurements and quantitative geometric information. This paper presents a Bayesian network approach to anomaly detection using unstructured 3D point cloud data, addressing challenges such as lack of global coordinate ordering, variant anomaly patterns, and outliers. A variational expectation-maximization algorithm is employed for parameter estimation and inference.
Types of Anomalies on the Steel Surface
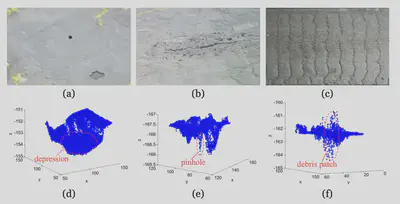
- Three types of anomalies on the steel surface:
- (a) pinhole
- (b) depression
- (c) oscillation mark
- Three types of anomalies on the steel surface:
- (d) depression
- (e) pinhole
- (f) debris patch
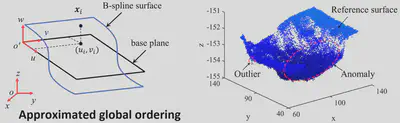
Assumption:
- (1) Globally smooth reference surface; Approximated by the B-spline surface with a parametric base plane
- (2) Locally smooth anomaly
- (3) Locally non-smooth outlier
- (4) Gaussian measurement noise
Goal
- Surface anomaly detection using one single point cloud sample.
Overall Framework
Result
The proposed method is effective and robust to the different types of anomalies. (Grey: reference surface point; Blue: anomaly point; Red: outlier point.)
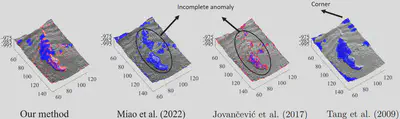
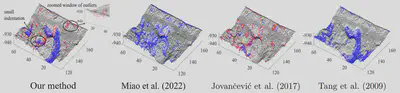
Real Case Study
The proposed method performs the best in real samples among the comparison methods.
Juan Du
Assistant Professor
My research interests include knowledge-infused data science for quality improvement, industrial data analytics and machine learning, and system informatics and control for manufacturing applications.