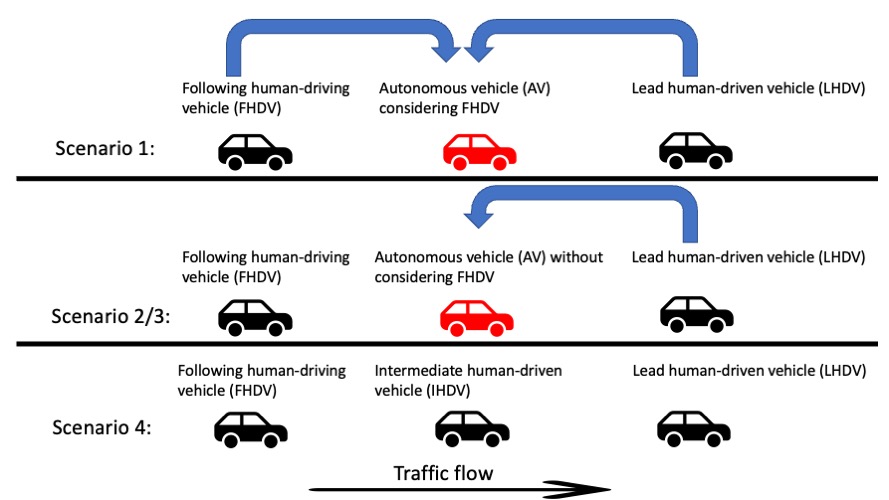
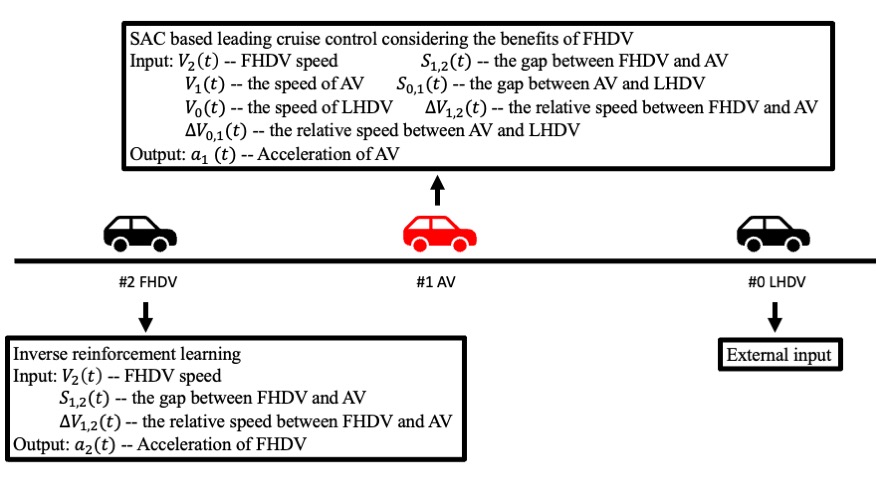
In recent years, autonomous vehicles (AVs) have been in the spotlight with the emergence of deep learning methods and advanced sensors. Although autonomous driving technologies are being developed at full speed, more and more transportation researchers, road engineers, and AV manufacturers have realized that before the mobility is fully automated, there will be a transition period due to the gradual deployment of AVs. The reasons for this are manifold: the need to update the current infrastructure system, the public acceptance and trust towards AVs, and the necessity to enact suitable regulations and legislation. The gradual deployment will lead to the mixed traffic environment where the traffic flow is composed of both AVs and human-driven vehicles (HDVs). Thus, the research questions that arise in this context include: (1) whether and how AVs affect driving behaviors of surrounding HDVs in the mixed traffic environment; and (2) how the control logic of AVs should be designed to improve safety, fuel economy and efficiency of mixed traffic as a whole.
- Student PI(s): Xiao Wen
- Sponsor/Collaborators: Prof. Sisi Jian, Hong Kong University of Science and Technology
- Project date: Sep 1, 2021 - now
Related Publications
1:Wen, X., Cui, Z., and Jian, S. (2022). Characterizing human drivers’ behaviors when following automated vehicles using the real-world dataset, Accident Analysis & Prevention., 172, p.106689.
1:Wen, X., Jian, S., and He, D. (2022). Modeling Human Driver Behaviors When Following Autonomous Vehicles: An Inverse Reinforcement Learning approach, In Proceedings of the 25th IEEE International Conference on Intelligent Transportation Systems (ITSC).
1:Wen, X. (2022). Investigating the Effects of Autonomous Vehicles on Following Human-Driven Vehicles Using Inverse Reinforcement Learning, In Proceedings of the 26th International Conference of Hong Kong Society for Transportation Studies (HKSTS).
1:Wen, X., Huang, C., Jian, S., and He, D. (2022). Exploring Discretionary Lane-changing Behaviors of Autonomous Vehicles Using the Waymo Open Dataset, In Proceedings of the 23rd COTA International Conference of Transportation Professionals (CICTP).